




Wall Follower Robot dengan Fuzzy Logic (Level 2)
Pada level 2 ini kita akan mencoba untuk membuat sedikit cara gimana caranya buat kodingan fuzzy logic di arduino, bagi yang belum baca Wall Follower Robot dengan Fuzzy Logic (Level 1) sebaiknya baca itu dulu, karena ini celotehan postingan lanjutan si doi (level 1).
sebenernya di arduino ada library khususon buat kontrol fuzzy,
tinggal panggil library nya, terus masuk masukin selesai deh
katanya sih gitu,.
tapi disini kita coba secara manual, biar ngerti dikit lah ngoding fuzzy ke gimana
dari psotingan sebelum nya yang level 1 langkah pertama kan membuat fuzzyfikasi
disini juga sama langkah pertama yaitu membuat fuzzyfikasi
langsung aja ga usah banyak cat cit cut
disini juga sama langkah pertama yaitu membuat fuzzyfikasi
langsung aja ga usah banyak cat cit cut
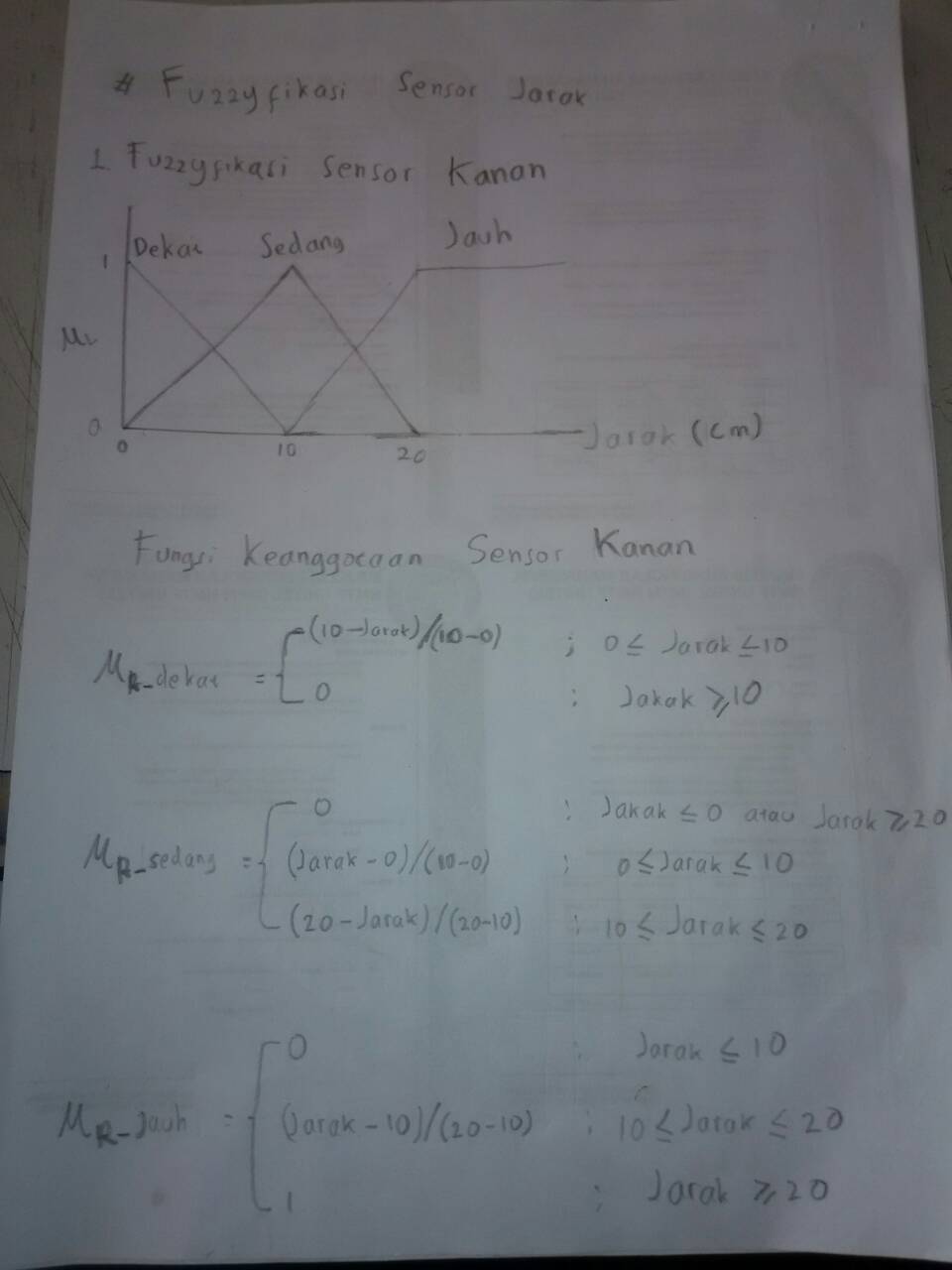
=========================== Langkah 1 fuzzyfikasi ============================
Untuk mengingatkan kembali fuzzyfikasi pada postingan sebelumnya yaitu seperti gambar di bawah ini


untuk kodingannya seperti ini


Note Langkah 1: pada langkah ini dari fuzzyfikasi akan menghasilkan miu sensor depan dan miu sensor kanan
=========================== Langkah ke 2 Inferensi ===========================

untuk programnya kita akan mengikuti inferensi yang telah kita buat,
kurang lebih kaya gini ya

disitu kenapa pakai min,
yaa,,karena kita menggunakan sugeno dengan metode average so,
aturan sugeno yaitu min max kan, jadi pada rule ini kita harus mendapatkan nilai min dari setiap miu miu yang dibandingkan
Note Langkah 2: Langkah ke 2 ini input nya miu miu miu an, nanti hasilnya juga tetap menjadi miu miu an, tapi miu nya dimasukan kedalam aksi motor, dan miu miu ini kita gunakan miu yang terkecil dari setiap perbandingan di tiap rule nya
========================= Langkah ke 3 Mencari Z ============================
dilangkah ini kita akan mencari Z (misal aja ya namanya Z, kalau mau yang lain juga boleh)
Z ini didapatkan dari perbandingan antara miu miu yang didapatkan pada langkah ke 2, setelah miu miu ini didapatkan, maka dibandingkan si miu miu nya dan di ambil nilai yang paling besar
seperti pada gambar di bawah ini


nah untuk program nya kurang lebih sama kaya gambar di atas

========================= Langkah ke 4 Defuzzyfisi ============================
Langkah terakhir nih
defuzzyfikasi
katanya sih ini menggunakan metode average (ambil rata rata)
untuk contoh kasus pada level 1, defuzzyfikasinya seperti dibawah ini

itu kan misal ya, dengan contoh kasus jarak depan 50 cm, jarak kanan 2 cm
menghasilkan lah pwm kiri 35, dan pwm kanan 115
secara otomatis si robot akan cenderung melaju ke kiri, atau belok kiri
programnya kurang lebih seperti ini

nah seperti itulah programnya
untuk FULL CODE nya nanti di share ya
ckckckcckckck
jadi kurang lebih ya kaya gitu cara membuat program fuzzy logic di arduino
bila kurang mengerti silahkan bertanya
semoga bermanfaat
Terima Kasih
Read more
Untuk mengingatkan kembali fuzzyfikasi pada postingan sebelumnya yaitu seperti gambar di bawah ini

untuk kodingannya seperti ini


Note Langkah 1: pada langkah ini dari fuzzyfikasi akan menghasilkan miu sensor depan dan miu sensor kanan
=========================== Langkah ke 2 Inferensi ===========================

untuk programnya kita akan mengikuti inferensi yang telah kita buat,
kurang lebih kaya gini ya

disitu kenapa pakai min,
yaa,,karena kita menggunakan sugeno dengan metode average so,
aturan sugeno yaitu min max kan, jadi pada rule ini kita harus mendapatkan nilai min dari setiap miu miu yang dibandingkan
Note Langkah 2: Langkah ke 2 ini input nya miu miu miu an, nanti hasilnya juga tetap menjadi miu miu an, tapi miu nya dimasukan kedalam aksi motor, dan miu miu ini kita gunakan miu yang terkecil dari setiap perbandingan di tiap rule nya
========================= Langkah ke 3 Mencari Z ============================
dilangkah ini kita akan mencari Z (misal aja ya namanya Z, kalau mau yang lain juga boleh)
Z ini didapatkan dari perbandingan antara miu miu yang didapatkan pada langkah ke 2, setelah miu miu ini didapatkan, maka dibandingkan si miu miu nya dan di ambil nilai yang paling besar
seperti pada gambar di bawah ini


nah untuk program nya kurang lebih sama kaya gambar di atas

========================= Langkah ke 4 Defuzzyfisi ============================
Langkah terakhir nih
defuzzyfikasi
katanya sih ini menggunakan metode average (ambil rata rata)
untuk contoh kasus pada level 1, defuzzyfikasinya seperti dibawah ini

itu kan misal ya, dengan contoh kasus jarak depan 50 cm, jarak kanan 2 cm
menghasilkan lah pwm kiri 35, dan pwm kanan 115
secara otomatis si robot akan cenderung melaju ke kiri, atau belok kiri
programnya kurang lebih seperti ini

nah seperti itulah programnya
untuk FULL CODE nya nanti di share ya
ckckckcckckck
jadi kurang lebih ya kaya gitu cara membuat program fuzzy logic di arduino
bila kurang mengerti silahkan bertanya
semoga bermanfaat
Terima Kasih












































